
. 2014. “Programmable self-assembly in a thousand-robot swarm.” Science, 345, 6198.Abstract
Kilobots
Fish gotta school, Birds gotta flock, ... and Robots, it seems, gotta swarm (Science News)
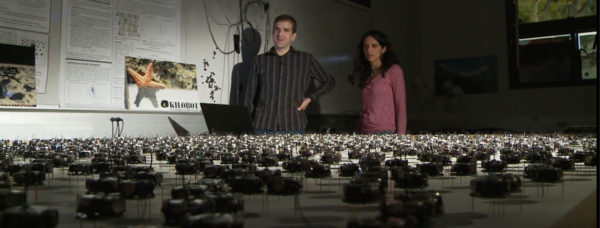
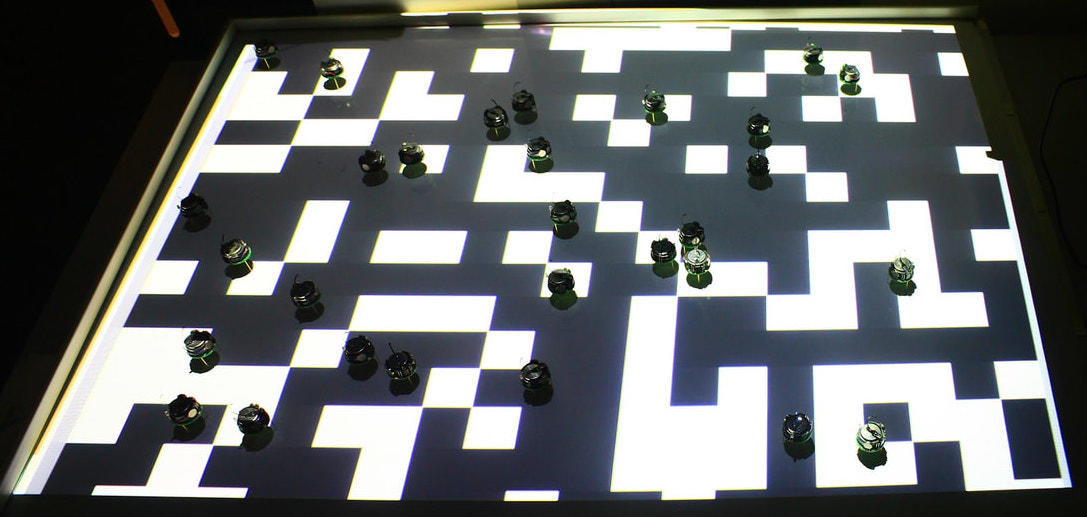
The Kilobot swarm is a thousand-robot (1024) swarm designed to allow one to program and experiment with collective behaviors in large-scale autonomous swarms. Each robot has the basic capabilities required for an autonomous swarm robot (programmable controller, basic locomotion, and local communication), but is made with low-cost parts and is mostly assembled by an automated process. In addition, the system design allows a single user to easily and scalably operate a large Kilobot collective, such as "hands-off" programming, powering on, and charging all robots. We use the Kilobot swarm to investigate collective "artificial" intelligence (e.g. sync, collective transport, self-assembly) as well as to explore new theories that link minimal individual capabilities to acheivable swarm behaviors. By using a combined theory-experiment approach, we aim to develop new algorithmic insights into robustness, scalability, self-organization, and emergence in collectives of limited individuals. Some of the topics we work on are:
- New! Collective Perception and Decision-Making (AAMAS 2018, ICRA 2020)
- Programmable Self-assembly and Disassembly (Science 2014, DARS 2016)
- Error Cascades and Robustness (AAMAS 2017)
- Collective Transport (AAMAS/IROS 2013)
- and more ..... see publications below.... and movies!
The Kilobot Swarm was chosen by Science Magazine as one of the Top 10 breakthroughs for 2014, and was also highlighted in Nature's magazine's top 10.
The Kilobot robots are available commercially by K-Team Corp; over 8000 robots exist across dozens of labs worldwide! The design is also available open-source for non-commercial use (see below). We have also developed a Web-based Programming Environment Kilobotics, along with a set of tutorials to make it easy to get started. Our goal is to make experimental research on collective behaviors possible across disciplines, and widely accessible to researchers, educators, and for public communication of science. In addition to CS/robotics groups (e.g. Sabine Haeurt at Bristol, Marco Dorigo at), our robots are also owned by biologists. e.g. UCSF's Center for Systems Biology (Wendell Lim) and NJIT Social Insects Research Group (Simon Garnier). If you use the Kilobots in your research, please cite our Science 2014 paper to help us demonstrate impact.
KILOBOT MOVIES: Youtube Kilobot Channel
OPEN-SOURCE DESIGN: If you would like to build your own Kilobots, all the software and hardware details are available under a Creative Commons attribution-NonCommercial-ShareAlike 3.0 Unported (CC BY-NC-SA 3.0) license. (zipped directory)
PEOPLE: Julia Ebert (current), Melvin Gauci, Mike Rubenstein (creator), Alex Cornejo (Kilobotics), Monica Ortiz, Sabine Hauert, Adrian Cabrera, Nick Hoff, Christian Ahler.
FUNDING: DARPA DSO, NSF, and the Wyss Institute
PRESS AND MEDIA
"Building 1,000 robots is hard", McLurkin said. "Getting 1,000 robots to work together reliably is, how they’d say it in Boston? Wicked hard." (Boston Globe)
The Kilobot Project is published in Science: Lots of media coverage!
Science: Fish gotta school, birds gotta flock, and robots, it seems, gotta swarm.
Boston Globe: Tiny robots ‘swarm’ into shape.
National Geographic: A thousand cooperative self-organising robots.
NPR: All Things Considered, a podcast interview with Michael Rubenstein
BBC News, Nature News, Scientific American,
IFL!, IEEE Spectrum, Wired Magazine, Popular Mechanics,
Ars Technica (by Sabine Haeurt!),
Harvard Gazette, SEAS/Wyss Press release, NSF News,
The Telegraph (India)
Awards
Science Top 10 breakthroughs for 2014
AFRON Challenge Winner (Wired Sep 2012)
Wyss and K-Team License Press Release (Nov 2011)
Other Articles
Rise of the Swarm, Communications of the ACM, 2013.
SEAS Article (Kilobots are leaving the nest), 2011
Slashdot Article (Nov 2011)
Inside NOVA Blog (Adventures in Swarm Robotics), 2011
IEEE Spectrum blog article (June 2011).
WORKSHOPS and LABS
NSF Workshops: "Collective Robotics for Life Scientists"
UCSF Center for Systems Biology (Aug 2014, hosted by Wendell Lim and Marshall Wallace): An Overview Video | Website | UCSF News | Kilobots-for-Biology. NJIT-Princeton Social Insects Groups (Aug 2015, hosted by Simon Garnier): Press Article by Storehouse | Swarmlab's Research. The robots are used currently by both groups for research, graduate training, and public outreach (see photos on right)
Other Labs with Kilobot Swarms: Marco Dorigo (Robotics, Belgium), Simon Garnier (Bio, NJIT), Roderich Gross and James Marshall (CS and Bio, Sheffield UK), Sabine Hauert (Robotics, Bristol UK), Wendell Lim (Bio, UCSF), Mike Rubenstein (Northwestern), James Sharpe (Bio, Spain), and more.
Publications
- . 2020. “Bayes Bots: Collective Bayesian Decision-Making in Decentralized Robot Swarms.” Intl. Conference on Robotics and Automation (ICRA).
- . 2018. “Multi-Feature Collective Decision Making in Robot Swarms.” In Intl. Conf. on Autonomous Agents and Multiagent Systems (AAMAS).Abstract
- . 2017. “Error Cascades in Collective Behavior: A Case Study of the Gradient Algorithm on 1000 Physical Agents.” In 16th International Conference on Autonomous Agents and Multiagent Systems (AAMAS).Abstract
- . 2016. “Programmable Self-Disassembly for Shape Formation in Large-Scale Robot Collectives.” In 13th International Symposium on Distributed Autonomous Robotic Systems (DARS).Abstract
- . 2013. “Collective Transport of Complex Objects by Simple Robots: Theory and Experiments.” In Intl. Conf. on Autonomous Agents and Multiagent Systems (AAMAS). (pdf)
- . 2013. “Massive Uniform Manipulation: Controlling Large Populations of Simple Robots With a Common Input Signal.” In IEEE/RSJ Intl. Conf. on Intelligent Robots and Systems (IROS). (pdf)
- . 2014. “Distributed Range-Based Relative Localization of Robot Swarms.” In Intl. Workshop on the Algorithmic Foundations of Robotics (WAFR). (pdf)
- . 2012. “Kilobot: A Low Cost Scalable Robot System for Collective Behaviors.” In IEEE Intl. Conf on Robotics and Automation (ICRA). (pdf)

")









")
